
Současné možnosti roboticky asistované cévní chirurgie
Potential of Robot-assisted Vascular Surgery
Aim:
Based on experience with 150 robot-assissted vascular reconstructions, the authors discuss current potential applications of the Da Vinci robotic system in vascular surgery, as well as a potential for further use of this new technology in vascular surgery.
Material and Methodology:
In vascular surgery, laparoscopic methods have never been used as much as in general surgery. Although many studies presenting interesting outcomes have been published, laparoscopic vascular surgery has not been generally accepted. Its main problems include duration of the procedure and, in particular, the vascular staple size and associated difficulties with the vascular anastomosis suturing. However, recently, there have been many revolutionary advancements in medicine, including vascular surgery. Robot-assisted surgery is the next step in the development of miniinvasive methods. From November 2005 to August 2009, the authors performed 150 robot-assisted vascular reconstructions in the aorto-iliac region. Besides aorto-femoral reconstructions, the most significant procedures also included aortic aneurysm procedures, procedures on pelvic and splenic arteries, as well as hybrid procedures.
Results:
In four cases (2.7%) conversion to classical procedures were required and four subjects (2.7%) developed serious postoperative complications. In a single case (0.7%), the robotic apparatus had a defect during the procedure and the procedure was completed using laparoscopy. In a single case (0.7%), the procedure had to be cancelled because of an inoperable finding on the aorta. The average duration of the procedure in this study group was 228 minutes, the average time required for anastomosis suturing was 27 minutes and the average stapling time was 39 minutes.
Conclusion:
Robotic systems increase accuracy, control and quality of surgical procedures and offer higher quality surgery to patients. The authors managed to reach the world primacy in the field of vascular surgery and the Czech Republic has become a significant world leader in this superspecialized surgical specialty.
Key words:
laparoscopy – robotic surgery – Da Vinci system – minimally invasive methods in vascular surgery
Autoři:
P. Štádler; L. Dvořáček; P. Vitásek; P. Matouš
Působiště autorů:
Oddělení cévní chirurgie, Nemocnice Na Homolce, Praha, prim. doc. MUDr. Petr Štádler, Ph. D.
Vyšlo v časopise:
Rozhl. Chir., 2010, roč. 89, č. 1, s. 28-32.
Kategorie:
Monotematický speciál - Původní práce
Souhrn
Cíl:
Autoři se na základě svých zkušeností se 150 roboticky asistovanými cévními rekonstrukcemi zamýšlejí nejen nad současnými možnostmi využití robotického systému Da Vinci v cévní chirurgii, ale uvažují i o dalším rozšíření této nové technologie ve svém oboru.
Materiál a metodika:
Rozvoj laparoskopie v cévní chirurgii nebyl nikdy tak veliký jako v chirurgii všeobecné a navzdory publikovaným pracem se zajímavými výsledky nebyla laparoskopická cévní chirurgie obecně přijata. Mezi její hlavní problémy patří doba operačního výkonu a hlavně délka svorky, se kterou souvisí obtížnost šití cévní anastomózy. V poslední době však medicína doznává revolučních změn a ty se nevyhýbají ani cévní chirurgii. Roboticky asistovaná chirurgie představuje další stupeň rozvoje miniinvazivních metod. V období mezi listopadem 2005 a srpnem 2009 provedli autoři 150 roboticky asistovaných cévních rekonstrukcí v aortoiliacké oblasti. Mezi nejvýznamnější patří vedle aortofemorálních rekonstrukcí operace výdutě břišní aorty, pánevní tepny nebo slezinné tepny a dále pak první zkušenosti s hybridními výkony.
Výsledky:
Ve čtyřech případech (2,7 %) byla nutná konverze na klasickou operaci a čtyři pacienti (2,7 %) prodělali závažnější pooperační komplikaci. Jednou (0,7 %) nastala během operace porucha robotického zařízení a operace byla dokončena laparoskopicky. V jednom případě (0,7 %) muselo být od operace ustoupeno pro inoperabilní nález na aortě. Průměrný operační čas byl v uváděném souboru 228 minut, průměrný čas potřebný pro šití anastomózy 27 minut a průměrný čas svorky 39 minut.
Závěr:
Robotické operační systémy zvyšují přesnost, kontrolu a zručnost provedení chirurgického výkonu a nabízejí pacientům kvalitativně vyšší stupeň operačních zákroků. Autorům se podařilo dobýt v oblasti robotické cévní chirurgie světové prvenství a Česká republika se stala významným světovým lídrem v této superspecializované chirurgické oblasti.
Klíčová slova:
laparoskopie – robotická chirurgie – Da Vinci systém – minimálně invazivní přístupy v cévní chirurgii
ÚVOD
Asi před 20 lety začali chirurgové při svých výkonech uplatňovat zcela nový přístup, který je známý jako minimálně invazivní chirurgie. Během této doby jsou klasické operační rány nahrazeny několika malými vstupy pro trokary a pacienti jsou operováni za pomoci laparoskopických nástrojů a kamery [1, 2, 3, 4, 5]. I když přinesla tato revoluční technologie pro pacienty mnoho pozitivního, objevily se i některé nedostatky, mezi které patří 2-D obraz, přítomnost třesu ruky chirurga a rigidní nástroje.
Nástup robotiky znamená zásadní zlom pro laparoskopickou cévní chirurgii, kde je poměrně obtížná manipulace s nástroji a dlouhé šití anastomózy, což vyúsťovalo i v poměrně dlouhou dobu svorky na aortě nebo pánevní tepně. Robotický systém tyto zásadní nevýhody laparoskopie odstraňuje a otevírá možnosti pro rozšíření roboticky asistované laparoskopické cévní chirurgie [6, 7].
Hlavní výhodou roboticky asistovaných cévních operací je v důsledku výborné pohyblivosti robotických nástrojů právě významně kratší čas ve srovnání se standardní laparoskopickou cévní operativou, který je potřeba k našití cévní anastomózy a tudíž i kratší délka svorky na aortě nebo pánevních tepnách (Obr. 1).

Robotickou chirurgii lze obecně charakterizovat jako operace s využitím počítačem řízeného robotického systému.
Operační robot Da Vinci je víceramenný systém, složený ze tří hlavních částí. První část se nazývá operační konzola, která může mít tři nebo čtyři ramena. Druhou částí je přístrojová věž a třetí část tvoří pracoviště operatéra, takzvaná ovládací konzola, odkud se řídí ramena s nástroji a kde má lékař prostřednictvím 3-D obrazu dokonalý přehled v operované oblasti pacientova těla. Neodmyslitelnou součástí systému je i výkonný počítač.
Narozdíl od laparoskopických nástrojů, které nemají ohebné konce jsou robotické nástroje v podstatě pohyblivé jako ruka (Endo-Wrist technika) a dá se s nimi při operačním výkonu velmi dobře manipulovat všemi směry. Všechny pohyby jsou zpracovány počítačem tak, aby zpřesnily bezpečný pohyb chirurgických nástrojů v pacientově těle. To vše spolu s eliminací třesu ruky chirurga přispívá k podstatnému snížení operačních rizik [8].
Robotický systém již prodělal od svého nástupu do klinické praxe v roce 2000 několik konstrukčních změn. První systémy byly poměrně robustní a postupně dochází k určité redukci velikosti systému i dalšímu vylepšování této technologie. Inovovaná verze robota, která je označena jako Da Vinci S HD přináší řadu zlepšení. Mezi nejvýznamnější patří panoramatický 3-D HD obraz se zlepšením jasu a rozsahu sledované oblasti. Dalšími novinkami jsou digitální zoom, který redukuje potenciální interferenci mezi rameny robota a větší rozsah pohybů robotických ramen a možnost nových tenčích 5mm nástrojů. Mezi zajímavá vylepšení můžeme zařadit i jednorázové adaptéry pro nástroje, které jsou součástí sterilních návleků robotických ramen, umožňující rychlejší přípravu systému i výměnu nástrojů. Posledními novinkami jsou integrovaná dotyková obrazovka a zařízení zlepšující hlasovou komunikaci mezi lékaři. Nejnovější verze robotického systému Da Vinci SI HD přináší novou ergonomickou ovládací konzolu pro chirurga s integrovaným dotykovým ovladačem, multidisplay s 3-D obrazem a možností sledování dalších dvou video informací (např. ultrazvuk, EKG atd.). Zcela zásadní novinkou je volitelná druhá ovládací konzole, která může být použita pro chirurga, který asistuje nebo ke klinické výuce roboticky asistovaných operací (Obr. 2).

MATERIÁL A METODA
Podle našich dosavadních zkušeností lze roboticky úspěšně provádět cévní anastomózu na aortě i na pánevní tepně a to dokonce snadněji než při klasické laparoskopické operaci. Roboticky lze tedy běžně provádět nitrobřišní anastomózy iliako nebo aortofemorálních výkonů. Další možností je odstranění aterosklerotických hmot z lumen aorty nebo pánevních tepen, které mohou způsobit jejich zúžení a robotický systém je tedy možné využít k tromboendarterektomiím velkých tepen a následně i pro uzávěr takto desobliterovaných tepen cévní záplatou. Při operacích výdutí břišní aorty se pak jedná o provádění cévních anastomóz, odstranění trombotických hmot z vaku výdutě, uzávěr lumbálních tepen, které po otevření vaku výdutě zpětně krvácejí i k sutuře vaku výdutě aorty po rekonstrukci. V dutině břišní je pak na závěr u všech výše popsaných výkonů provedena robotická sutura retroperitonea [9, 10].
Robotické cévní operace je možné rozdělit podle lokalizace na výkony v pánevní oblasti, na břišní aortě, na viscerálních tepnách nebo na hrudní aortě. Toto rozdělení však neodpovídá stupni obtížnosti, protože na pánevní tepně může být prováděna jednoduchá roboticky asistovaná centrální anastomóza iliakofemorální rekonstrukce nebo poměrně složitější resekce a náhrada výdutě pánevní tepny, kdy jsou roboticky našívány obě anastomózy (Obr. 3). Příznivější rozdělení se nabízí podle typu onemocnění, kdy se může jednat o robotické operace v aortoiliacké oblasti z důvodu aterosklerotického postižení nebo aneurysmatického postižení. Obecně náročnější výkony na viscerálních tepnách, hybridní výkony v kombinaci s endovaskulárními technikami a robotické operace hrudní aorty zcela jistě patří jen do rukou zkušených vaskulárních chirurgů s dobrými zkušenostmi laparoskopie a robotiky (Obr. 4, 5).



Všechny roboticky asistované cévní operace byly provedeny kombinovaně za použití standardní laparoskopie a robotického systému Da Vinci. Pacienti byli v naprosté většině případů uloženi na pravý bok v úhlu 30°–45° a robotický systém byl umístěn na pravé straně pacientova těla. Jedinou výjimkou tvořila operace aneuryzmatu slezinné tepny (SAA), při které ležel operovaný na zádech a pozice robota byla šikmo za levým ramenem pacienta. Během laparoskopie byla jednak fixací retroperitonea ke stěně břišní vytvořena bariéra, která zabraňovala vnikání střevní kliček do operačního pole a následně i preparace příslušné části aortoiliackého řečiště probíhala laparoskopicky. Vlastní zákrok na tepnách byl již prováděn roboticky. Při operaci SAA jsme navíc roboticky provedli i vlastní preparaci slezinné tepny (Obr. 6, 7). Při operaci byla v naprosté většině případů využívána tři robotická ramena, jen při operacích výdutě pánevní tepny jsme čtvrté rameno použili pro robotický nástroj, který sloužil jako retraktor k vytvoření dostatečného prostoru pro šití anastomóz.)


VÝSLEDKY
V období od listopadu 2005 do srpna 2009 bylo na oddělení cévní chirurgie Nemocnice Na Homolce v Praze provedeno 150 roboticky asistovaných cévních operací v aortoiliacké oblasti. Některé výkony byly ve světové premiéře (výduť pánevní tepny, výduť břišní aorty, rekonstrukce břišní aorty se záplatou, výduť slezinné tepny, iliakorenální rekonstrukce jako součást hybridní operace atd. [11]). Autoři na základě svých klinických zkušeností v laparoskopické cévní chirurgii upravili a zjednodušili některé postupy a kroky, které byly následně úspěšně použity právě v robotické cévní chirurgii. Zásadní změnou je modifikovaný transperitoneální přístup, který významně zjednodušuje a zkracuje délku operace [12]. Zajímavým vylepšením, které je běžně používáno v klasické chirurgii bylo použití balónkových katetrů k dočasnému uzávěru pánevních tepen při operaci výdutě břišní aorty (AAA), nebo fixace stěny vaku výdutě stehem při operacích AAA. Během robotického výkonu jsou dva Fogartyho katetry velikosti 5 F zavedeny přes 5 mm trokar do břišní dutiny a po otevření vaku AAA jsou umístěny do odstupů obou pánevních tepen ke kontrole zpětného krvácení. Následně může být provedena fixace vaku AAA stehem k břišní stěně, která umožňuje zlepšený intraluminální přehled.
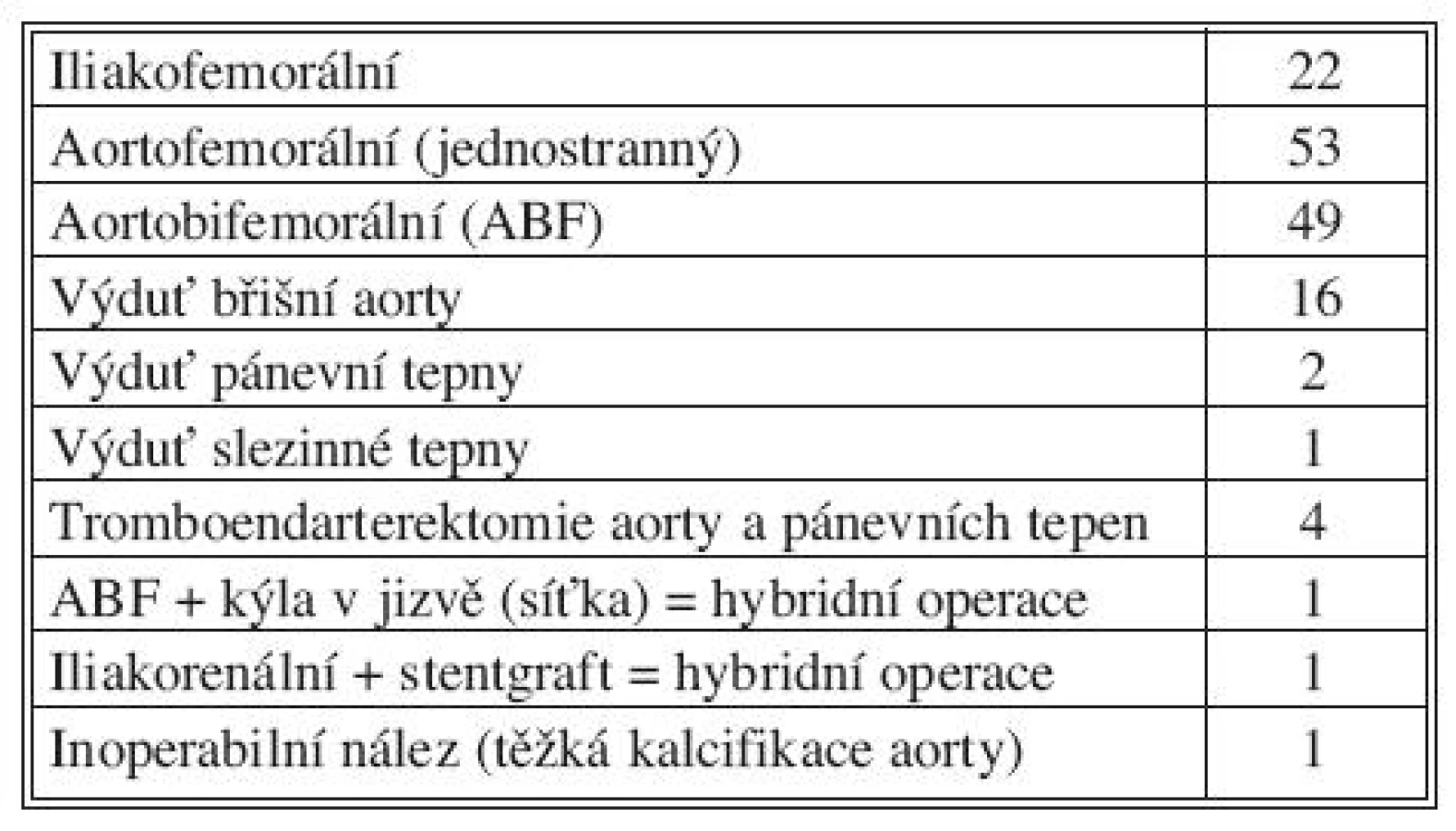
V uváděném souboru 150 pacientů nebyla mortalita, ve čtyřech případech (2,7 %) byla nutná konverze na klasickou operaci ve formě mini nebo plné laparotomie a čtyři pacienti (2,7 %) prodělali závažnější pooperační komplikaci. Jednou (0,7 %) nastala během operace porucha robotického zařízení, v tomto případě byla operace dokončena laparoskopicky a v jednom případě (0,7 %) muselo být od operace ustoupeno pro inoperabilní nález v oblasti subrenální i suprarenální oblasti (nestlačitelná kalcifikovaná aorta). Tento pacient nemusel být indikován k extraanatomické rekonstrukci z důvodu relativně dlouhého klaudikačního intervalu, který činil 100–150 metrů a byl převeden na plnou vazodilatační konzervativní léčbu. Jednotlivé typy cévních rekonstrukcí jsou uvedeny v tabulce 1.
Charakteristika souboru pacientů je uvedena v tabulce 2, kde je patrno, že převahu tvoří muži. Peroperační a pooperační data jsou uvedena v tabulce 3. Průměrný operační čas byl v uváděném souboru 228 minut, průměrný čas potřebný pro šití anastomózy 27 minut a průměrný čas svorky 39 minut. Pacienti byli převedeni na běžnou dietu mezi druhým a třetím pooperačním dnem a průměrná doba hospitalizace byla mírně vyšší než 5 dnů.


DISKUSE
K uvedeným operačním časům je třeba říci, že soubor obsahuje 16 roboticky asistovaných operací AAA, kde byly časy svorek, anastomóz i celkové doby operace delší ve srovnání s operacemi indikovanými pro aterosklerotické postižení. Při operaci AAA je třeba jednak ošetřit lumbální tepny, extrahovat trombus z aneuryzmatického vaku aorty a hlavně jsou roboticky šity obě aortální anastomózy. Všechny tyto kroky prodlužují uváděné operační časy. Průměrný čas anastomózy a průměrný čas svorky bývá u roboticky asistovaných AAA dvojnásobný a celková doba operace je prodloužena o 5–10 % (Obr. 8).

Robotická chirurgie se dnes většinou vyvíjí jako multidisciplinární obor zahrnující různé operační obory a zároveň využívá veškerých předností minimálně invazivních metod. Jedná se zejména o urologii, kardiochirurgii, cévní chirurgii, všeobecnou břišní chirurgii, gynekologii, hrudní chirurgii a onkochirurgii.
V centrech robotické chirurgie bývá převážně multidisciplinární operační sál, na kterém se střídají jednotlivé chirurgické obory. S dalším rozvojem robotické chirurgie se ale začínají objevovat i jednooborová pracoviště v důsledku prudšího rozvoje určité robotické chirurgické specializace. Do budoucna si lze v oblasti cévní chirurgie jistě představit využití robotických systémů i na hrudní aortě a hlavně v kombinaci s endovaskulárními technikami při tzv. hybridních výkonech, které by mohly nahradit některé typy velice náročných výkonů v oblasti hrudní a břišní aorty [13, 14, 15, 16].
Při zavádění metody byly, zejména zpočátku, indikováni k výkonům spíše mladší pacienti bez významnějších přidružených onemocnění. S rostoucími zkušenostmi je okruh vhodných kandidátů pro roboticky asistované výkony rozšiřován. Operace břišní aorty jsou však obecně pro pacienty velkou zátěží a jsou spojeny s vysokým rizikem, zvláště u polymorbidních nemocných s těžší formou ischemické choroby srdeční a poruchou renálních a respiračních funkcí. Nevhodní k laparoskopickým a také k roboticky asistovaným výkonům jsou jistě nemocní s těžkou formou obstrukční choroby bronchopulmonální s ohledem na nutnost kapnoperitonea. Kontraindikace kapnoperitonea znamená automaticky i kontraindikaci laparoskopicko-robotického cévního výkonu.
Dále neindikujeme pacienty po velkých, zvláště opakovaných, nitrobřišních výkonech s četnými peritoneálními srůsty, ale jak bylo zmíněno, obezita již není kontraindikací.
ZÁVĚR
Z praktického hlediska je největším přínosem robotiky pro cévní chirurgii rychlost zhotovení cévní anastomózy. Tím byla odstraněna největší nevýhoda laparoskopických cévních rekonstrukcí – dlouhý čas naložené cévní svorky. Zkrácením času nutného ke zhotovení anastomózy se zkrátí i doba dočasné ischémie dolních končetin při naložené aortální svorce. Tyto časy jsou velice podstatné pro srdeční zátěž i reperfuzi svalů a podstatně ovlivňují pooperační průběh včetně morbidity a mortality. V současné době jsou tyto časy srovnatelné s klasickou cévní chirurgií a navíc využíváme všech výhod miniinvazivní chirugie. Pacient profituje hlavně z kratší doby hospitalizace a z možného brzkého návratu k běžným aktivitám i pracovní činnosti, kterou je prakticky možno provádět ve většině případů bez výraznějších omezení. Nezanedbatelný je vynikající kosmetický efekt. S výhodou je možné používat tuto metodu i u obézních pacientů, kde je klasický výkon technicky náročný a často bývá porucha hojení rány po laparotomii.
Výhodou této nové technologie je, že výrazně zvyšuje přesnost chirurgického výkonu v důsledku eliminace třesu rukou operatéra i dokonalého 3D obrazu. Navíc je možné provádět chirurgický zákrok i v místech, kde by byl klasickou chirurgickou nebo laparoskopickou technikou obtížně proveditelný. V důsledku těchto skutečností jsou takové operace pro pacienta bezpečnější.
Prim.
MUDr. Petr Štádler, Ph.D.
Roentgenova
2
150
30 Praha 5
e-mail:
petr.stadler@homolka.cz
Zdroje
1. Dion, Y. M., Katkhouda, N., Rouleau, C., Aucoin, A. Laparoscopy-assisted aortobifemoral bypass. Surg. Laparosc. Endosc., 1993 : 3: 425–429.
2. Barbera, L., Mumme, A., Metin, S., Zumtobel, V., Kemen, M. Operative results and outcome of twenty-four totally laparoscopic vascular procedures for aortoiliac occlusive disease. J. Vasc. Surg., 1998 : 1: 136–142.
3. Dostalík, J., Martínek, L., Chmelo, J. Aortobifemorální bypass laparoskopicky asistovaný. Rozhl. Chir., 1999 : 5: 214–217.
4. Matsumoto, Y., Nishimori, H., Yamada, H., Yamamoto, A., Okazaki, Y., Kusume, K., Hata, A., Toshimitsu, Y., Yamamoto, M., Sasaguri, S. Laparoscopy-assisted abdominal aortic aneurysm repair: first case reports from Japan. Circ. J., 2003 : 67 : 99–101.
5. Štádler, P., Špaček, M., Matouš, P., Vitásek, P., Kořisková, Z., Michálek, P. Laparoskopické cévní rekonstrukce – úvodní zkušenosti. Rozhl Chir., 2004 : 11 : 549–553.
6. Wisselink, W., Cuesta, M. A., Gracia, C., Rauwerda, J. A. Robot-assisted laparoscopic aortobifemoral bypass for aortoiliac occlusive disease: A report of two cases. J. Vasc. Surg., 2002 : 36 : 1079–1082.
7. Ruurda, J. P., Wisselink, W., Cuesta, M. A., Verhagen, H. J., Broeders, I. A. Robot-assisted versus standard videoscopic aortic replacement. A comparative study in pigs. Eur. J. Vasc. Endovasc. Surg., 2004 : 27 : 501–506.
8. Štádler, P., Matouš, P., Vitásek, P., Špaček, M. Robot-assisted aortoiliac reconstruction: A review of 30 cases. J. Vasc. Surg., 2006 : 44 : 915–919.
9. Štádler, P., Dvořáček, L., Vitásek, P., Matouš, P. Is Robotic Surgery Appropriate for Vascular Procedures? Report of 100 Aortoiliac Cases. Eur. J. Vasc. Endovasc. Surg., 2008 : 36 : 401–404.
10. Wisselink, W. Is robotic surgery right for vascular procedures? Report of 100 aortoiliac cases by Petr Stádler, et al. Eur. J. Vasc. Endovasc. Surg., 2008 : 36 : 405–406.
11. Štádler, P., Vitásek, P., Matouš, P., Dvořáček, L. Hybridní roboticky asistovaná operace, aortobifemorální bypass s rekonstrukcí kýly v jizvě. Rozhl. Chir., 2008 : 11 : 590–592.
12. Štádler, P., Šebesta, P., Vitásek, P., Matouš, P., El Samman, K. A modified technique of transperitoneal direct approach for totally laparoscopic aortoiliac surgery. Eur. J. Vasc. Endovasc. Surg., 2006 : 3: 266–269.
13. Ishikawa, N., Sun, Y. S., Nifong, L. W., Ohtake, H., Watanabe, G., Chitwood, W. R. Jr. Robotic replacement of the descending aorta in human cadaver. Artif. Organs., 2006 : 30 : 719-721.
15. Wahlgren, C. M., Skelly, C., Shalhav, A., Bassiouny, H. Hybrid laparorobotic debranching and endovascular repair of thoracoabdominal aortic aneurysm. Ann. Vasc. Surg., 2008 : 22 : 285–289.
16. Katz, M. R., Van, Praet, F., de Canniere, D., Murphy, D., Siwek, L., Seshadri-Kreaden, U., Friedrich, G., Bonatti, J. Integrated coronary revascularization: percutaneous coronary intervention plus robotic totally endoscopic coronary artery bypass. Circulation., 2006 : 114: (1 Suppl): I473–I476.
Štítky
Chirurgie všeobecná Ortopedie Urgentní medicínaČlánek vyšel v časopise
Rozhledy v chirurgii

2010 Číslo 1
- Rána vizitkou (nejen) chirurga
- Patogeneze vzniku keloidní jizvy
- Klinické studie neprokázaly vyšší účinnost obvazů s obsahem stříbra nebo medu při hojení bércových vředů
- Pseudomonas aeruginosa a Staphylococcus aureus v chronických ranách
- Vliv vysoké vlhkosti na hojení ran
Nejčtenější v tomto čísle
- Cévní protézy: 50 let vývoje od syntetických k tkáňovému inženýrství a buněčné terapii
- Úspešné kombinované riešenie aneuryzmy aberantnej retroezofageálne prebiehajúcej arteria subclavia dextra (arteria lusoria). Kazuistika
- Chronická žilní insuficience a možnosti moderní chirurgické léčby v oblasti povrchního systému
- Pedální bypass – desetileté zkušenosti
Zvyšte si kvalifikaci online z pohodlí domova
Mazová zátka a její řešení
nový kurzVšechny kurzy