
Kineziologie chůze
Autoři:
I. Vařeka 1,2,3; M. Janura 4; R. Vařeková 4
Působiště autorů:
Rehabilitační klinika, Fakultní nemocnice Hradec Králové
1; Lékařská fakulta Univerzity Karlovy v Hradci Králové
2; Katedra fyzioterapie, Fakulta tělesné kultury, Univerzita Palackého v Olomouci
3; Katedra přírodních věd v kinantropologii, Fakulta tělesné kultury, Univerzita Palackého v Olomouci
4
Vyšlo v časopise:
Rehabil. fyz. Lék., 25, 2018, No. 2, pp. 81-86.
Kategorie:
Postgraduální vzdělávání
ÚVOD
Bipedální chůze je základní formou lokomoce člověka a případná porucha či dokonce ztráta této funkce má pro postiženého zásadní význam. To je také důvod, proč je znalost kineziologie a patokineziologie chůze významná nejen pro lékaře či fyzioterapeuty a ergoterapeuty, ale i pro další odborníky, kteří se analýzou chůze zabývají. Přístrojová analýza chůze má historii dlouhou zhruba 150 let, reprezentativní přehled jejího vývoje podává Sutherland (44-46) či Lu a Chang (26).
Moderní diagnostika chůze má počátek v druhé polovině 40. let, kdy byly USA, stejně jako jiné země, postaveny před nutnost řešit oprotézování velkého množství mladých mužů, kteří utrpěli devastující poranění dolních končetin. Z toho důvodu vznikl v San Francisku na sklonku II. světové války National Research Council Advisory Committee on Artificial Limbs. Členem této pracovní skupiny byl mimo jiné i ortoped V. T. Inman, který ke spolupráci přizval civilního inženýra H. D. Eberharta, s nímž se příznačně seznámil, když mu prováděl bércovou amputaci. Jejich následná spolupráce, která přinesla moderní postupy analýzy chůze stejně jako zásadní poznatky o jejím normálním a patologickém průběhu, trvala 30 let. V rámci Department of Engeneering v Berkeley se společně s dalšími spolupracovníky (např. Ch. Radcliffe, H. J. Ralston) zúčastnili práce na Prosthetic Device Research Project. Jejich Lower Extremities Amputee Research Laboratory byla později přeměněna do slavné Biomechanics Laboratory (od 1957 na Medical School San Francisco, 1967-1974 opět v Berkeley), kterou prošla řada významných odborníků a mezinárodně uznávaných autorů, jejichž díla dodnes představují základ studia normální a patologické chůze. Jednou z nich byla také J. Perry, která svoji vědeckou kariéru začínala právě v Inmanově Biomechanics Laboratory a poté pokračovala v neméně slavném Rancho Los Amigos National Rehabilitation Center (Los Angeles County). Inspirací pro její práci byly poruchy chůze u dětí v důsledku polyomyelitidy. Obdobně se J. R. Gage zabýval poruchami chůze v důsledku dětské mozkové obrny.
Průkopnické texty moderní diagnostiky chůze vznikly v 50. a 60. letech (19, 42). Na ně navázalo první vydání publikace Human Walking (21) a později řada dalších souhrnných textů z přelomu století (14, 22, 28, 33, 47), které jsou dodnes často citovány.
TERMINOLOGIE CHŮZE A KROKOVÉHO CYKLU
Chůze je cyklický pohyb, jehož základní jednotkou je tzv. krokový cyklus, který vymezují dva po sobě následující kontakty jedné nohy s podložkou. Základní dělení krokového cyklu je poměrně ustálené, i když se jednotliví autoři v podrobnostech liší, například v užití pojmů phases a periods, případně events, které někdy zaměňují (33, 34, 47, 55, 56). Hlavní předností terminologie dle Perry (33, 34) je podrobnější rozdělení oporné fáze a také nahrazení původního pojmu Hell Strike termínem Inicial Contact, což lépe odpovídá některým patologickým typům chůze (55).
Dělení krokového cyklu používané v dalším textu vychází především od autorů Perry a Burnfield (34) a Sutherland, Kaufman a Moitoza (47). Je ale nutno připomenout, že délka fází a období krokového cyklu je proměnlivá v závislosti na řadě faktorů, především na rychlosti chůze.
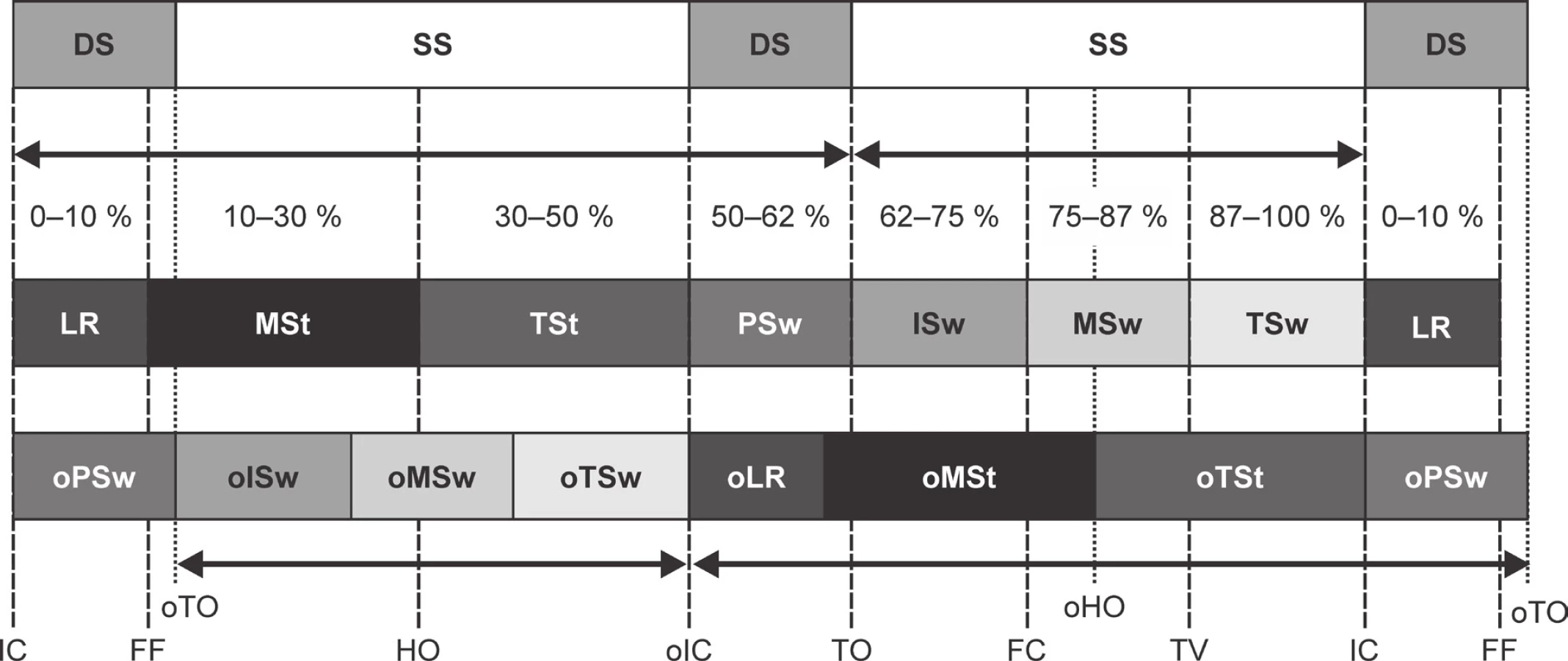
Krokový cyklus (Gait Cycle, GC) je rozdělen na dvě hlavní fáze – opornou a švihovou, které jsou určitými událostmi (events) dále rozděleny na jednotlivá období (periods) (obr. 1). Oporná fáze (Stance Phase, StP), a tedy i celý krokový cyklus, začíná okamžikem iniciálního kontaktu nohy (Initial Contact, IC), typicky na patě (Heel Strike, HS). Tím je zahájeno období postupného zatížení (Loading Response, LR), které probíhá od 0 do 10 % trvání krokového cyklu (0-10 % GC). Ukončeno je v okamžiku dosažení plného kontaktu plosky (Foot Flat, FF). Ke zvednutí palce kontralaterální nohy (opposite Toe Off, oTO) dochází až během následujícího období střední opory (MidStance, MSt; 10-30 % GC), které končí okamžikem zvednutí paty (Heel Off, HO). Následné období aktivního odrazu (Terminal Stance, TSt; 30-50 % GC), nazývané také active propulsion, končí okamžikem kontralaterálního IC (oIC). Poslední částí oporné fáze je období pasivního odrazu (PreSwing, PSw), které končí okamžikem zvednutí palce (Toe Off, TO; 62 % GC). Švihová fáze (Swing Phase, SwP) začíná obdobím iniciálního švihu (Initial Swing, ISw; 62-75 % GC), které během míjení nohou (Foot Clearance, FC; 75 % GC) přechází do období středního švihu (MidSwing, MSw; 75-87 % GC). Okamžik vertikálního postavení tibie švihové dolní končetiny (Tibia Vertical, TV) zahajuje období terminálního švihu (Terminal Swing, TSw; 87-100 % GC), které je ukončeno, stejně jako celý krokový cyklus, dalším IC, načež začíná další krokový cyklus příslušné dolní končetiny. Překrytím oporných fází obou dolních končetin vzniká dvouoporové období (Duble Support, DS), které je střídáno jednooporovým obdobím (Single Support, SS).
ZÁKLADNÍ MECHANISMY CHŮZE
Inman a Eberhart definovali na přelomu 40. a 50. let funkčně-anatomické mechanismy, které, dle jejich názoru, snižují energetickou náročnost chůze (42). Právě tato práce se stala inspirací pro velké množství pozdějších prací a učebnic, včetně těch současných. Čistě mechanický přístup obou autorů k dané problematice vyplynul z jejich profesního zaměření a vědomí zvýšených energetických nároků chůze s protézou. Při formulaci hlavních mechanismů snížení těchto nároků proto vycházeli z II. Newtonova zákona, který říká, že síla je součinem hmotnosti a zrychlení (F = m . a). V energeticky optimálním modelu bipedální chůze se proto těžiště plynule pohybuje po sinusoidě s nízkou amplitudou, přičemž právě plynulost pohybu je hlavní faktorem energetické úspornosti. Při demonstraci tohoto principu vycházeli ze základního segmentového modelu, který je tvořen horizontální pánví skloubenou se dvěma rigidními vertikálními segmenty, a který „kráčí“ tzv. kružítkovou chůzí, již si lze představit jako chůzi po patách s extendovanými koleny. Pro takovou chůzi jsou charakteristické výrazné vertikální i laterální výchylky těžiště spolu s výraznými změnami rychlosti jeho pohybu. Postupnou modifikací tohoto energeticky náročného modelu Inman a Eberhart demonstrovali význam „šesti determinant chůze“, které bychom dnes spíše označili za funkčně-anatomické mechanismy. Patří k nim: 1. střídavá horizontální rotace pánve, 2. pokles pánve na straně švihové končetiny spolu s flexí jejího kolena, 3. flexe kolena během prvních dvou třetin oporné fáze, 4. a 5. spojení plantiflexe hlezna a flexe kolena během první a poslední šestiny oporné fáze a nakonec 6. přirozená valgozita kolena s relativní addukcí v kyčli, které redukují laterální výchylky těžiště. Jen samotné první tři mechanismy omezí dle mínění původních autorů vertikální výchylky těžiště natolik, že poloměr zakřivení jeho trajektorie je roven více než dvojnásobku délky dolní končetiny. Mimo jiné tak oproti základnímu kružítkovému modelu dochází k prodloužení kroku při stejném rozsahu flexe a extenze v kyčli, což vede ke zrychlení chůze bez nutnosti zvyšování krokové frekvence. Flexe kolena švihové končetiny, a tedy její zkrácení, vede buďto k redukci síly nutné k provedení tohoto švihu při dané rychlosti, nebo naopak k jeho zrychlení, a tedy i k zrychlení chůze bez nutnosti vyvinout větší sílu.
Princip energetické úspornosti rozvinul Ralston (35), který experimentálně zjistil, že lidé mají tendencí kráčet přirozenou rychlostí, jež se blíží optimu, které je určeno nejnižší spotřebou O2 na kilogram tělesné hmotnosti. Snížením či zvýšením této rychlosti spotřeba O2 roste, takže příslušná křivka spotřeby má parabolický tvar. Patoanatomické změny, např. amputace, pak vedou k posunu křivky nahoru a doleva, takže roste spotřeba O2 při všech rychlostech chůze a současně klesá přirozená rychlost (19).
Později byl význam těchto mechanismů/determinant chůze pro snížení energetických nároků zpochybněn (11, 15, 24, 31) a následně opět rehabilitován (17). Navzdory některým výhradám zůstává znalost výše uvedených základních mechanismů chůze dodnes cenná nejen pro odborníky v oblasti analýzy chůze, ale i pro kliniky. Umožňuje totiž jednoduše a logicky vysvětlit význam pohybů v hlavních kloubech dolní končetiny a bederní páteře, stejně jako důsledky jejich omezení či ztráty. Současně je ale třeba zdůraznit, že tento koncept nezahrnuje řadu dalších významných faktorů, což ostatně z hlediska doby svého vzniku ani nemohl. Stručný přehled těchto faktorů nabízí tabulka 1, přičemž některé z nich budou popsány níže.

Mechanismus sdružených pohybů v kloubech nohy a vyšších etáží dolní končetiny a bederní páteře
Analýza chůze se zaměřuje především či téměř výhradně na pohyby v sagitální rovině, ve které dochází k pohybům s velkým rozsahem a ve které také probíhá dopředný pohyb celého těla. Naše běžné pohyby ale obvykle neprobíhají pouze v jedné rovině, naopak dochází ke sdružování pohybů (joint coupling) ve více rovinách, jak na úrovni jednoho kloubu, tak i mezi klouby. Také pro normální průběh chůze mají zásadní význam sdružené rotační pohyby v transverzální rovině, stejně jako pohyby v rovně frontální.
Ke konci období TSw se hlezno nachází v mírné supinaci, takže při IC, resp. HC, na něj působí výrazný pronační moment reakční síly podložky, který vyvolá pronaci v subtalárním kloubu. Ta je spojena s odemknutím Chopartova kloubu (27) a také s vnitřní rotací bérce pomocí tzv. pantového mechanismu subtalárního kloubu (20, 27). Reakční síla podložky současně vyvolává mohutný flekční moment kolena, přičemž platí, že i flexe v kolenu je spojena s vnitřní rotací bérce, současně je koleno flexí odemknuto (obr. 2). Tyto sdružené pohyby hlezna a kolena umožní aktivní tlumení energie dopadu (viz níže). Během období MSt přechází koleno do extenze, což je provázeno zevní rotací bérce a také uzamknutím kolena (obr. 3). V oblasti hlezna dochází k relativní dorziflexi, oproti předchozímu období LR, supinaci zánoží tahem tricepsu (23) a plantární aponeurózy (18, 29). Tato supinace v subtalárním kloubu je spojena se zevní rotací bérce, podobně jako extenze kolena, a současně uzamyká Chopartův kloub. Tím zpevňuje celé předonoží, které je tak připraveno na výrazné zatížení během následujícího období TSt. Ke zpevnění nohy přispívá také tzv. kalkaneobuboidní zámek (5, 6). Skutečný průběh těchto sdružených pohybů je ovlivněn funkčním typem nohy a poměrně velkou variabilitou anatomických poměrů v oblasti kyčelního kloubu. V rámci kompenzačních mechanismů pak dochází k řetězení poruch v širokém rozmezí od nohy po bederní páteř (20, 29, 37, 52, 53).


Mechanický efekt zkříženého pohybuhorních končetin
Kinetická energie švihové dolní končetiny má tendenci rotovat tělo kolem osy oporné dolní končetiny. Význam zkříženého pohybu paží spočívá především v tlumení této rotace (19, 22, 33,34). Omezenou či chybějící stabilizační funkci paží, např. při nesení břemena, onemocnění či v experimentu, kompenzují výraznější pohyby trupu a také větší aktivita svalstva dolních končetin, což vede ke zvýšení reakční síly podložky (32). Fázový posun kyvadlových pohybů paží oproti pohybům dolních končetin (out-of - phase) je označován jako křižmochodní chůze (resp. kontralaterální či Kreuzgang). Ta se může změnit na tzv. mimochodní chůzi (resp. homolaterální či Passgang) i u zdravého člověka s dobrou koordinací, například při chůzi proti silnému větru, v hlubokém sněhu, ve vodě atd. Pohyb paží není nutně jen kyvadlově pasivní, naopak bylo prokázáno, že aktivní švih paží facilituje svalovou aktivitu dolních končetin, což lze využít v rehabilitaci (13).
Úloha postury, rovnováhy a koordinace/řízení chůze
Koordinace/řízení chůze je stejně jako koordinace/řízení jiných složitých pohybů rozsáhlá problematika, která přesahuje možnosti tohoto textu. Především je ale nutné zdůraznit, že nejsložitější podmínkou chůze je zajištění postury a rovnováhy, zatímco řízení střídavé flexe a extenze mohou zajistit centrální generátory vzorů na míšní či nižší mozkové úrovni, dokonce je lze poměrně dobře napodobit i pomocí mechanických systémů pasivní chůze (51).
K hlavním faktorům, které ovlivňují koordinaci/řízení chůze, patří především princip energetické úspornosti (19, 35, 42) a dále (pato)anatomicky dané možnosti a limity, nocicepce, aktuální psychický stav spolu s motivací a metabolické a hormonální změny a poruchy (2, 30, 58). Od určité rychlosti chůze je pro daného člověka výhodnější běh než chůze (39-41), v poslední době je za hlavní faktor přechodu chůze-běh považována kroková frekvence (16). Současně platí, že jak rychlost chůze, tak i kroková frekvence, jsou ovlivněny již zmíněnými (pato)anatomickými faktory, stejně jako nocicepcí či psychikou.
Kinetika chůze, tlumení dopadu a mechanismus propulze
Chůze je, jako každý pohyb, výsledkem působení vnitřních a zevních sil, které působí na jednotlivé segmenty těla. Hlavní vnitřní sílou je kontrakční síla svalů, k zevním sílám náleží především tíhová síla, reakční síla podložky, setrvačná síla, tření a odpor prostředí. Práce svalů uděluje systému určitou kinetickou a potencionální energii, jejichž poměr se cyklicky mění. Jako při každé přeměně energie dochází i zde ke ztrátám, resp. konečné přeměně na tepelnou energii. Na těchto ztrátách, které jsou odhadovány na 50 % mechanické energie trupu a horních končetin během jednoho GC (28), se podílí působení zevních sil, neelastická deformace tkání a jejich viskózní odpor a také excentrická kontrakce svalů při tlumení energie dopadu paty. Právě na začátku GC dochází k prudkému zpomalení pohybu celého těla, jehož těžiště získalo kinetickou energii díky poklesu ze své nejvyšší polohy v období oMSt druhostranné dolní končetiny. Na tlumení dopadu se výrazně podílí deformace měkkých tkání pod patou. Pod silnou subkutánní vrstvou se nachází systém silných spirálovitě uspořádaných vazivových sept, která jsou spojená s kalkaneem a tvoří tak tlakové komory vyplněné tukovou tkání (10), jejichž tloušťka se při zatížení redukuje na polovinu. Obdobnou stavbu mají i měkké tkáně pod hlavičkami metatarzů, vrstva je ale slabší (1). Navíc se při HC uplatňuje mechanismus sdružených pohybů DK, kdy se končetina během LR zkracuje - pánev poklesá ke švihové dolní končetině, koleno se flektuje a odemyká spolu s vnitřní rotací bérce, kalkaneus pronuje a Chopartův kloub se odemyká, čímž klesá rigidita předonoží. Část energie dopadu je pohlcena excentrickou kontrakcí svalů, především extenzorů kolena, které tyto pohyby brzdí. Současně se tak prodlužuje doba trvání dopadu. Perry (33) udává trvání IC po období 0–2 % GC. Část energie, která je pohlcena v elastických strukturách, může být v omezené míře využita při následné propulzi.
Výše uvedené ztráty je nutné nahradit, přičemž novou mechanickou energii dodávají systému svaly dolních končetin. Dle Wintera (57) poskytují plantiflexory hlezna 85 % potřebné energie, zbylých 15 % dodávají flexory kyčelního kloubu. Gage (14) tyto údaje upřesnil tak, že plantiflexory poskytují 36 % energie hlezna během TSt, zatímco během následujících období PSw a ISw dodávají flexory kyčle 22 % a extenzory kolena 10 % a současně kontralaterální extenzory kyčle 32 % během oLR. K vlastní propulzi (push off) dochází podle obecné představy během TSt, kdy se aktivitou plantiflexorů hlezna zvyšuje celková energie (14, 53). Perry (33) ale připomíná, že během TSt nedochází k plantiflexi, naopak je dosaženo maximum dorziflexe, takže mohutná kontrakce plantiflexorů není koncentrická, ale excentrická. Výrazná plantiflexe nastává až během následujícího období PSw, kdy ale již prakticky mizí aktivita plantiflexorů. V období TSt dochází ke zhoupnutí nohy přes hlavičky metatarzů, při kterém působí tíhová síla na relativně dlouhém rameni páky proti zvedání paty, resp. vyvolává mohutný dorziflekční moment hlezna. Úlohou mohutné aktivity plantiflexorů je zabránit této dorziflexi, resp. udržet vzájemné postavení nohy a bérce a umožnit tak zhoupnutí přes hlavičky metatarzů a následný „pád“ těžiště vpřed k oIC druhostranné nohy, což je dle Perry hlavní propulzní síla při chůzi. Z toho důvodu také doporučuje používat spíše termín roll-off namísto push-off.
Zatížení nohy během oporné fáze charakterizují jednak změny velikosti reakční síly podložky a také trajektorie působiště této síly (center of pressure, COP). Průběh trajektorie COP vzhledem k plosce nohy je typický pro jednotlivé funkční typy nohy a lze ho využít v diagnostice obdobně jako rozložení otlaků plosky (29, 37, 54).
ZÁVĚR
Lidská bipedální chůze je komplexní pohyb, jehož koordinace vychází z anatomických možností daného jedince a je řízena tak, aby bylo dosaženo daného cíle bez zbytečných energetických ztrát a nadměrného zatížení či poškození pohybových struktur. Zásadním problémem chůze je nejen koordinace střídavého pohybu dolních končetin, ale také stabilizace postury a udržení rovnováhy. Znalost základních chůzových mechanismů a principů má význam nejen pro výzkum, ale i pro klinickou praxi.
Adresa ke korespondenci:
Doc. MUDr. Ivan Vařeka, Ph.D.
Rehabilitační klinika LF UK a FN
Nezvalova 265
500 03 Hradec Králové
e-mail: ivan.vareka@fnhk.cz
Zdroje
1. AERTS, P., KER, R. F., DE CLERCQ, D., ILSLEY, D. W., ALEXANDER, R. M.: The mechanical properties of the humanheel pad: a paradox resolved. J. Biomech., roč. 28, 1995, č. 11, s. 1299-1308.
2. BANO, A., CHAKER, L., DARWEESH, S. K., KOREVAAR, T. I., MATTACE-RASO, F. U., DEHGHAN, A., FRANCO, O. H., VAN DER GEEST, J. N., IKRAM, M. A., PEETERS, R. P.: Gait patterns associated with thyroid function: The Rotterdam Study. Sci. Rep., roč. 6, 2016, č. 38912.
3. BERNSTEIN, N. A.: The co-ordination and regulation of movement. Oxford, Pergamon Press, 1967.
4. BIZOVSKÁ, L., JANURA, M., MÍKOVÁ, M., SVOBODA, Z.: Rovnováha a možnosti jejího hodnocení. Olomouc, UP v Olomouci, 2017.
5. BOJSEN-MØLLER, F.: Calcaneocuboid joint and stability of the longitudinal arch of the foot at high and low gear push off. J. Anat., roč. 129, 1979, č. 1, s. 165-176.
6. BOJSEN-MØLLER, F.: Normální i patologická anatomie předonoží. Ref. výb. Ortop. Traum. příb. obor., 1985, č 4-5, s. 303-312.
7. CABELL, L., PIENKOWSKI, D., SHAPIRO, R., JANURA, M.: Effect of age and activity level on lower extremity gait dynamics: An introductory study. J. Strength. Cond. Res., roč. 27, 2013, č. 6, s. 1503-1510.
8. COLLINS, S. H., ADAMCZYK, P. G., KUO, A. D.: Dynamic arm swinging in human walking. Proc. R. Soc. B., roč. 276, 2009, č. 1673, s. 3679-3688.
9. DALTON, E., ASTON, J.: Dynamic body. Exploring form, expanding function (1st edition). Freedom From Pain Institute, 2011.
10. DEBRUNER, H. U.: Biomechanik des Fußes. Stuttgart, Ferdinand Enke Verlag, 1985.
11. DELLA CROCE, U., RILEY, P. O., LELAS, J. L., KERRIGAN, D. C.: A refined view of the determinants of gait. Gait Posture, roč. 14, 2001, č. 2, s. 79-84.
12. FATOYE, F. A., PALMER, S., VAN DER LINDEN, M. L., ROWE, P. J., MACMILLAN, F.: Gait kinematics and passive knee joint range of motion in children with hypermobility syndrome. Gait Posture, roč. 33, 2011, č. 3, 447-451.
13. FERRIS, D. P., HUANG, H. J., KAO, P. C.: Moving the arms to activate the legs. Exerc. Sport. Sci. Rev., roč. 34, 2006, č. 3, s. 113-120.
14. GAGE, J. R.: Gait analysis in cerebral palsy. London, MacKeith Press, 1991.
15. GORDON, K. E., FERRIS, D. P., KUO, A. D.: Metabolic and mechanical energy costs of reducing vertical center of mass movement during gait. Arch. Phys. Med. Rehabil., roč. 90, 2009, č. 1, s. 136-144.
16. HANSEN, E. A., KRISTENSEN, L. A. R., NIELSEN, A. M., VOIGT, M., MADELEINE, P.: The role of stride frequency for walk-to-run transition in humans. Sci, Rep., roč. 17, 2017, č. 1, s. 2010.
17. HAYOT, C., SAKKA, S., LACOUTURE, P.: Contribution of the six major gait determinants on the vertical center of mass trajectory and the vertical ground reaction force. Hum. Mov. Sci., roč. 32, 2013, č. 2, s. 279-289.
18. HICKS, J. H.: The mechanics of the foot. J. Anat., roč. 87, 1953, č. 4, s. 345-357.
19. INMAN, V.T.: Human locomotion. Can. Med. Assoc. J., roč. 94, 1966, č. 20, s. 1047-1054.
20. INMAN, V. T.: The influence of the foot-ankle complex on the proximal skeletal structures. Artif. Limbs., roč. 13, 1969, č. 1, s. 59-65.
21. INMAN, V. T., RALSTON, H. J., TODD, F.: Human walking. Baltimore, Williams & Wilkins, 1981.
22. INMAN, V. T., RALSTON, H. J., TODD, F.: Human locomotion. In: J. ROSE & J.G. GAMBLE (Eds.) Human walking (2nd ed.), s. 1-22. Baltimore, Williams and Wilkins, 1994.
23. KAPANDJI, I. A.: The physiology of joints. Volume two. Lower limb. London, Churchill Livingstone, 1987.
24. KUO, A. D., DONELAN, J. M.: Dynamic principles of gait and their clinical implications. Phys. Ther., roč. 90, 2010, č. 2, s. 157-174.
25. LATASH, M. L., LEVIN, M. F., SCHOLZ, J. P., SCHÖNER, G.: Motor control theories and their applications. Medicina (Kaunas), roč. 40, 2010, č. 6, s. 382-392.
26. LU, T. W., CHANG, CH. F.: Biomechanics of human movement and its clinical applications. Kaohsiung J. Med. Sci., roč. 28, 2012, č. 2(Supplement), s. 13-25.
27. MANTER, J. T.: Movements of the subtalar and transverse tarsal joints. Anat. Rec., roč. 80, 1941, č. 4, s. 397-410.
28. MEGLAN, D., TODD, F.: Kinetics of human locomotion. In: J. ROSE & J.G. GAMBLE (Eds.) Human walking, (2nd ed.), s. 73-100. Baltimore, Williams and Wilkins. 1994.
29. MICHAUD, T. C.: Foot ortheses and other forms of conservative foot care. Newton, Massachusetts, Thomas C. Michaud, 1997.
30. MISU, S., ASAI, T., DOI, T., SAWA, R., UEDA, Y., SAITO, T., NAKAMURA, R., MURATA, S., SUGIMOTO, T., YAMADA, M., ONO, R.: Association between gait abnormality and malnutrition in a community-dwelling elderly population. Geriatr. Gerontol. Int., roč. 17. 2017, č. 8, s. 1155-1160.
31. ORTEGA, J. D., FARLEY, C. T.: Minimizing center of mass vertical movement increases metabolic cost in walking. J, Appl. Physiol. roč. 99, 2005, č. 6, s. 2099-2107.
32. PARK, J.: Synthesis of natural arm swing motion in human bipedal walking. J. Biomech., roč. 41, 2008, č. 7, s. 1417-1426.
33. PERRY, J.: Gait analysis. Normal and pathological function. Thorofare NJ, Slack Inc., 1992.
34. PERRY, J. BURNFIELD, J. M.: Gait analysis. Normal and pathological function (2nd ed.). Thorofare NJ, Slack Inc., 2010.
35. RALSTON, H. J.: Energy-speed relation and optimal speed during level walking. Int. Z. Angew. Physiol., roč., 17, 1958, č. 4, s. 277-283.
36. REESE, M. E., CASEY, E.: Hormonal influence on the neuromusculoskeletal system in pregnancy. In: C. FITZGERALD & N. SEGAL (Eds.) Musculoskeletal Health in Pregnancy and Postpartum. An Evidence-Based Guide for Clinicians, Springer, 2015, s. 19-39.
37. ROOT, M. L., ORIEN, W. P., WEED, J. H.: Normal and abnormal function of the foot. clinical biomechanics (Vol 2.). Los Angeles, Clinical Biomechanics Corporation, 1977.
38. ROOT, M. L., ORIEN, W. P., WEED, J. H., & HUGHES, R. J.: Biomechanical examination of the foot (Vol. 1). Los Angeles, Clinical Biomechanics Corporation, 1971.
39. ROTSTEIN, A., INBAR, O., BERGINSKY, T., MECKEL, Y.: Preferred transition speed between walking and running: effects of training status. Med. Sci. Sports. Exerc., roč. 37, 2005, č., 11, s. 1864-1870.
40. SASAKI, K., NEPTUNE, R. R.: Differences in muscle function during walking and running at the same speed. J. Biomech., roč. 39, 2006, č. 11, s. 2005-2013.
41. SASAKI, K., NEPTUNE, R. R.: Muscle mechanical work and elastic energy utilization during walking and running near the preferred gait transition speed. Gait Posture, roč. 23, 2006, č. 3, s. 383-390.
42. SAUNDERS, J. B., INMAN, V. T., EBERHART, H. D.: The major determinants in normal and pathological gait. J. Bone Joint Surg. (Am), roč. 35A, 1953, č. 3, s. 543-558.
43. SHIN, S. J., KIM, T. Y., YOO, W. G.: Effects of various gait speeds on the latissimus dorsi and gluteus maximus muscles associated with the posterior oblique sling system. J. Phys. Ther. Sci., roč. 25, 2013, č. 11, s. 1391-1392.
44. SUTHERLAND, D. H.: The evolution of clinical gait analysis. Part I: Kinesiological EMG. Gait Posture, roč. 14, 2001, č. 1, s. 61-70.
45. SUTHERLAND, D. H.: The evolution of clinical gait analysis. Part II: Kinematics. Gait Posture, roč., 16, 2002, č. 2, s. 159-179.
46. SUTHERLAND, D. H.: The evolution of clinical gait analysis. Part III: Kinetics and energy assessment. Gait Posture, roč. 21, 2005, č. 4, s. 447-461.
47. SUTHERLAND, D. H., KAUFMAN, K. R., MOITOZA, J. R.: Kinematics of normal human walking. In J. ROSE & J.G. GAMBLE (Eds.) Human walking (2nd ed.), s. 23-44. Baltimore, Williams and Wilkins, 1994.
48. SVOBODA, Z., BIZOVSKÁ, L., JANURA, M., KUBOŇOVÁ, E., JANUROVÁ, K., VUILLERME, N.: Variability of spatial temporal gait parameters and center of pressure displacements during gait in elderly fallers and nonfallers: A 6-month prospective study. PLoS ONE, roč. 12, 2017, č. 2, e0171997.
49. VAŘEKA, I.: Posturální stabilita (I. část). Terminologie a biomechanické principy. Rehabil. fyz. Lék., roč. 9, 2002, č. 4, s. 115-121.
50. VAŘEKA, I.: Posturální stabilita (II. část). Řízení, zajištění, vývoj, vyšetření. Rehabil. fyz. Lék., roč. 9, 2002, č. 4, s. 122-129.
51. VAŘEKA, M., BEDNÁŘ, R., VAŘEKOVÁ, R.: Robotická rehabilitace chůze. Cesk. Slov. Neurol. N., roč. 79/112, 2016, č. 2, s. 168-172.
52. VAŘEKA, I., DVOŘÁK, R.: Posturální model řetězení poruch funkce pohybového systému. Rehabil. fyz. Lék., roč. 8, 2001, č. 1, s. 33-37.
53. VAŘEKA, I., VAŘEKOVÁ, R.: Kineziologie nohy. Olomouc, Vydavatelství UP, 2009.
54. VAŘEKA, I., VAŘEKOVÁ, R.: Otlaky plosky v diagnostice funkčních typů nohy. Rehab. fyz. Lek., roč. 22, 2015, č. 2, s. 6-9.
55. VAUGHAN, CH. L., DAVIS, B. L., O´CONNOR, J. C.: Dynamics of human gait. Champaign Il, Human Kinetics, 1992.
56. WERNICK, J., VOLPE, R. G.: Lower extremity function and normal mechanics. In: R. L. Valmassy (Ed.), Clinical biomechanics of the lower extremities, s. 1-58). St. Louis, Mosby, 1996.
57. WINTER, D. A.: Overall principle of lower limb support during stance phase of gait. J. Biomechanics, roč. 13, 1980, č. 11, s. 923-927.
58. YU, J.: Endocrine disorders and the neurologic manifestations. Ann. Pediatr. Endocrinol. Metab., roč. 19, 2014, č. 4, s. 184-190
Štítky
Fyzioterapie Rehabilitační a fyzikální medicína Tělovýchovné lékařstvíČlánek vyšel v časopise
Rehabilitation & Physical Medicine

2018 Číslo 2
- Naděje budí časná diagnostika Parkinsonovy choroby založená na pachu kůže
- Bezpečná alternativa ke konvenční terapii osteoartrózy během pandemie COVID-19
- Flexofytol® – přírodní revoluce v boji proti osteoartróze kloubů
- Recentní pokroky ve fyzioterapii hemofiliků
- Turoktokog alfa pegol s prodlouženým poločasem v léčbě těžké hemofilie A
Nejčtenější v tomto čísle
- Kineziologie chůze
- Vplyv pohybovej aktivity a morfologického typu nohy na výskyt plochej nohy
- Vplyv mechanoterapie na opuch po plastike LCA
- Efekty kombinované terapie botulotoxinem a funkční elektrostimulace na spastickou chůzi pacientů po cévní mozkové příhodě
Zvyšte si kvalifikaci online z pohodlí domova
Mazová zátka a její řešení
nový kurzVšechny kurzy