
ROBOTICKY ASISTOVANÁ RADIKÁLNÍ LAPAROSKOPICKÁ PROSTATEKTOMIE: SOUČASNÝ STAV
Autoři:
Declan Murphy; Ben Challacombe; Arun Sahai; Peter Acher; Prokar Dasgupta
Působiště autorů:
King´s College London
; Spojené království (UK)
; Guy´s Hospital and School of Medicine
Vyšlo v časopise:
Urol List 2006; 4(4): 53-56
ÚVOD
O užití robotické technologie při operačních zákrocích je čím dál tím větší zájem. Velkou zvědavost vyvolalo zejména využití robota DaVinciTM (Intuitive Surgical, Sunnyvale, CA, USA) při laparoskopické radikální prostatektomii vyvolalo velkou zvědavost. Značný zájem médií o tuto technologii vedl k tomu, že pacienti jsou nyní lépe informováni o současných možnostech léčby lokalizovaného karcinomu prostaty. Pokud zvažujeme, jakou roli by robotická technologie při LRP mohla hrát, je třeba vzít v úvahu několik faktorů, v neposlední řadě obrovské náklady, které jsou s touto metodou spojeny. V tomto článku je hodnocen současný stav.
ROBOTICKÁ TECHNOLOGIE: HISTORIE A POZADÍ
Operační robot byl popsán jako „manipulátor řízený počítačem, s uměle vytvořeným vnímáním, opakovaně programovatelný k přemísťování a umísťování nástrojů v pořadí, které odpovídá operačním úkonům“ [1]. Současní operační roboti tuto definici vlastně nesplňují. Někteří autoři proto navrhovali, aby se pro úkony prováděné pomocí robotických přístrojů současné generace raději užívalo termínu počítačově asistovaná operace [2]. Ať již dojdeme k jakémukoliv závěru, termín robotický je při popisování celé řady technologií rozšířený.
Poprvé byla robotická technologie užita v urologii v Guy´s Hospital (Londýn, VB) ve spolupráci s Imperial College London (Londýn, UK) na konci 80. let minulého století. Robot určený pro prostatektomii, pojmenovaný PROBOT, užíval robotický rám, který naváděl rotující čepelku.
Přístroj dokončoval transuretrální resekci prostaty (TURP) [3]. Po počátečních studiích prováděných na bramborách tvaru prostaty následovaly klinické studie s pacienty, které prokázaly bezpečnost a schůdnost této technologie. Technologie PROBOT však nemohla fungovat ekonomicky.
ROBOTICKÉ LAPAROSKOPICKÉ MANIPULÁTORY
Vývoj laparoskopických manipulátorů, jako je například Automated Endoscopic System for Optimum Positioning (AESOPTM, Intuitive Surgical, Sunnyvale, CA, USA) a EndoAssistTM (Armstrong Healthcare, High Wycombe, UK), připravil cestu pokročilejším robotickým systémům (obr. 1). Tato zařízení ovládají laparoskop pomocí hlasu, pedálu nebo snímání pohybu infračervenými paprsky. Poskytují také stabilnější obraz a zamezují kolizi nástrojů, ke které dochází u zákroků, kdy je instrument veden lidskou rukou. [4]

Tyto systémy jsou užitečné zejména při zákrocích jako je LRP; operatér má volné ruce a může pracovat se 2 porty, zatímco systém zajišťuje velmi stabilní obraz. Jelikož laparoskopická operace trvá dlouho, jelikož je zapotřebí, aby obraz byl stabilní a jelikož pozice kamery při záběru pánve je poněkud nešikovná, jsou tito roboti při operaci velmi užiteční. Ovšem ne všechny instituce si mohou dovolit nezbytnou počáteční investici (přibližně 75 000 GBP/ 141 000 USD za AESOPTM a 30 000 GBP/ 55 000 USD za EndoAssistTM), i když provozní náklady jsou pak minimální.
OPERAČNÍ SYSTÉM DA VINCITM
Operační systém Da VinciTM (obr. 2) vyvolal zvýšení zájmu o využití robotické technologie na operačních sálech současnosti. Zásluhou tohoto systému se během minulých pěti let výrazně zvýšil počet robotických zákroků. V letech 2000 až 2004 se počet roboticky asistovaných operací zvýšil z 1 500 na více než 20 000 [5]. Počet robotizovaných zákroků vzrostl nejvíce v oboru urologie, kde bylo v roce 2004 provedeno více než 8 000 LRP s robotickou asistencí (RALP). RALP dnes představují více než 10 % radikálních prostatektomií ve Spojených státech; v nejbližších letech očekáváme další rozšíření.

V době vzniku tohoto článku bylo na celém světě instalováno více než 400 systémů Da VinciTM, ovšem ve Spojeném Království (UK) jich bylo instalováno pouhých 6, přičemž 4 tato zařízení jsou umístěna v Londýně, z toho 2 v soukromých nemocnicích.
Jak systém funguje? Da VinciTM je nejvyspělejším master-slave-systémem, jaký byl doposud vytvořen. Je to systém kdy lékař sedící za konzolou ovládá 3 (nebo 4) robotická ramena. Systém má 3 části:
- konzola, za níž sedí operatér
- operační vozík na straně pacienta
- věž zpracovávající obraz/insuflátor
Operatér ovládá robota zpoza konzoly umístěné mimo operační stůl. Z endoskopu se 3rozměrný (3D) obraz promítá na konzole v 10násobném zvětšení a operatér ovládá pohyby robotických ramen svým palcem a ukazovákem. Pedály umožňují ovládání diatermie a jiných zdrojů energie. Přenášení pohybu prakticky eliminuje otřesy, což umožňuje velmi jemné a přesné pohyby. Ramena robota jsou připevněna na operačním vozíku na straně pacienta. Na jednom rameni je umístěn 3D endoskop s vysokým rozlišením, na zbývajících ramenech jsou upevněny specializované instrumenty EndoWristTM. Věž pro zpracování obrazu obsahuje kontrolní jednotku s kamerou pro 3D-zobrazovací systém, zařízení zaznamenávající obraz, laparoskopický insuflátor a monitor pro asistenta umožňující 2D-zobrazení.
3D-zobrazení, zvětšení obrazu a zaznamenávání pohybu sice usnadní operatérovi práci, ale ten pozoruhodný přístroj dělá z Da VinciTM právě technologie EndoWristTM. Zatímco přístroje užívané při laparoskopii v současné době umožňují pouze 4 stupně pohybu (DOF), EndoWristTM má 7 stupňů stejně jako lidské zapěstí, což složité laparoskopické zákroky zjednodušuje.
TECHNIKA RALP
Průkopníkem této technologie je tým z Detroitu (MI, USA), který popsal techniku Vattikutti Institute Prostatectomy. Od roku 2000, kdy zde byla technologie RALP zavedena, proběhlo jen v samém institutu více než 2 500 roboticky asistovaných prostatektomií. Zdejší tým propracoval transperitoneální techniku, která vykazuje dobré onkologické výsledky s minimální morbiditou. V roce 2004 přijal tuto technologii Guy´s Hospital, který pak vyslal lékaře do Detroitu, aby mohli tamější tým sledovat při práci.
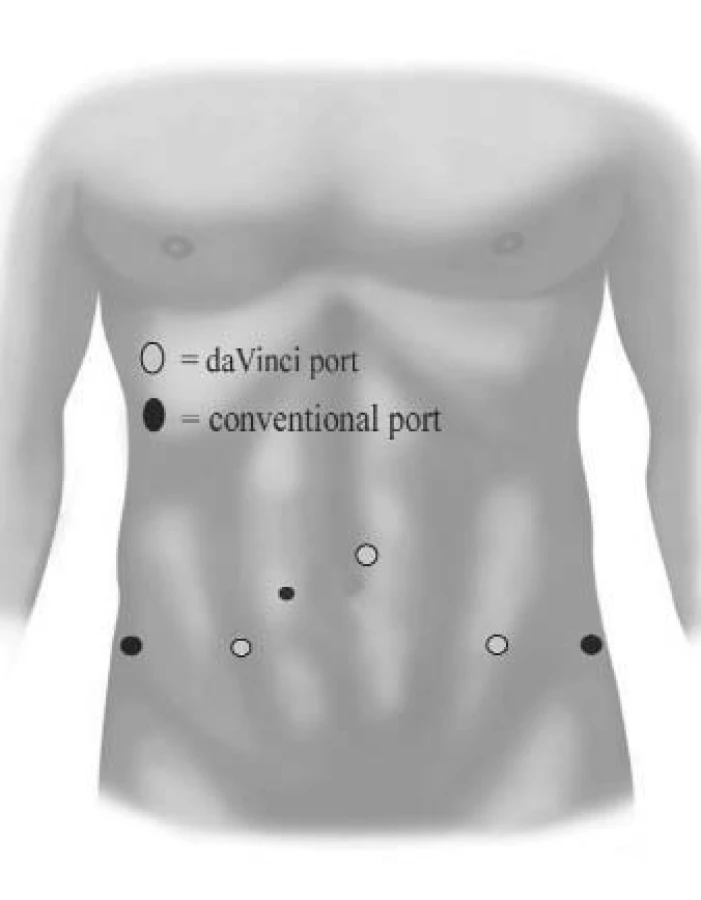
Zákrok se provádí v celkové anestezii; pacient se nachází v Trendelenbergově poloze. První port je umístěn do pupku, zavedení se kontroluje zrakem. Břišní dutina je naplněna oxidem uhličitým (obr. 3). Dalších 5 portů se zavádí pomocí laparoskopické navigace. Da VinciTM se pak napojí na pacienta prostřednictvím 3 (nebo 4) robotických ramen, která se propojí se zavedenými porty (obr. 4). Operatér sedí za konzolou v rohu místnosti, ovládá robotické instrumenty a sleduje laparoskopický 3D obraz na konzole. Operace se dále účastní 1 nebo 2 asistenti na straně pacienta, kteří pracují s běžnými laparoskopickými nástroji zavedenými ve zbývajících portech. Tým na straně pacienta komunikuje s operatérem za konzolou prostřednictvím interkomu. Přesné kroky operace jsou detailně popsány v jiné publikaci [6].

SOUČASNÉ VÝSLEDKY
Při hodnocení prvních 1 100 pacientů udávají Menon et al tyto výsledky: délka operace 70–160 min, ztráta krve 50–150 ml, žádná krevní transfuze a propuštění 95 % pacientů za ≤ 24 h [7]. U 96 % pacientů bylo po 6 měsících dosaženo úplné kontinence a z pacientů, kteří byli před operací potentní, mělo 60 % za stejnou dobu neasistovaný pohlavní styk. Autoři této studie pak popsali velmi elegantní metodu preparace neurovaskulárního svazku v oblasti apexu, někdy se mu říká Afroditin závoj; po tomto zákroku zůstává potence zachována až v 97 % [8]. Když autoři studie porovnali své zkušenosti s RALP a s LRP, konstatovali u skupiny, která prodělala LRP, významně delší dobu operace a ztrátu krve [9]. Možná nejdůležitějším výsledkem je 9% míra výskytu pozitivních okrajů při robotické operaci; při otevřené prostatektomii, která se prováděla dříve, to bylo 23 % [10]. Technika stanovení pozitivních okrajů je však v každé skupině jiná.
Podobná nerandomizovaná studie, provedená v Kalifornii, srovnávala výsledky 60 otevřených radikálních prostatektomií se 60 RALP [11]. Doba trvání operace byla u obou postupů podobná (214 min vs 231 min) stejně jako procento pozitivních okrajů (16,7 % vs 20 %), zatímco objem ztráty krve (103 ml vs 418 ml) byl u RALP nižší. V současné době neexistují řádné randomizované kontrolované studie, které by srovnávaly RALP s LRP nebo dokonce s otevřenou operací.
Onkologické výsledky RALP se dostaví za delší dobu, můžeme však očekávat, že se počet pacientů podstupujících tento zákrok zvýší s dostupností technologických vymožeností.
(Poznámka šéfredaktora: Dosažení podobného výskytu pozitivních chirurgických okrajů lze považovat za neobyčejně špatný výsledek u pacienta, kterého chceme radikální operací vyléčit. Může to být způsobeno špatnou indikací nebo špatnou technikou a obojímu bychom se měli snažit vyhnout. Experti provádějící otevřenou radikální prostatektomii dosahují 5% výskytu pozitivních chirurgických krajů při zachování erekce u 88 % pacientů. Cesta zlepšení zachování erekce za cenu zvýšení pozitivních chirurgických okrajů (tedy nevyléčení pacienta) není správnou cestou. Více v článku - Pacík D. Radikální prostatektomie: otevřená, laparoskopická nebo roboticky asistovaná - je možno některou objektivně preferovat? Urol List 2006; 4 : 48-52.)
VÝHODY ROBOTICKÉ TECHNOLOGIE
Výhody roboticky asistovaných zákroků oproti konvenčním laparoskopickým metodám jsou stále diskutabilní. Robotický zákrok má všechny přednosti laparoskopických operací, pokud je srovnáváme s operací otevřenou: nižší ztráta krve, kratší doba hospitalizace, rychlejší návrat k aktivnímu životu. Zůstává však otázka, zda má roboticky asistovaná operace výraznější výhody ve srovnání s laparoskopickým zákrokem.
Někteří lékaři provádějící laparoskopii tvrdí, že robotické zákroky jsou komerční záležitost a že je žádoucí, aby proběhl řádný vědecký výzkum, než se RALP v urologii etablují. Při zvažování případných výhod systémů, jako je například Da VinciTM, je třeba pečlivě posoudit nejen přednosti, ale také vysoké náklady a další nevýhody.
Nejvýraznější rozdíl mezi laparoskopickým a roboticky asistovaným zákrokem, který operatér zaznamená, je intuitivní povaha pohybu všech instrumentů. Laparoskopická operace má nevýhodu pákového efektu, špička instrumentu se totiž pohybuje v opačném směru než ruka operatéra. Robotické instrumenty Da VinciTM tento efekt eliminují, takže se špička instrumentu pohybuje ve stejném směru jako operátorova ruka na konzole. Přestože význam tohoto prvku není úplně zřejmý, umožní lékařům, kteří nemají zkušenost s laparoskopickou operací, snadnější přechod k minimálně invazivnímu zákroku. Detroitský tým navíc udává, že učební křivka pro RALP je kratší než pro LRP [12]. Ahlering et al prokázali, že je možné přejít z otevřené operace k operaci roboticky asistované, aniž by operatér musel zdolávat laparoskopickou učební křivku [13].
Další výhodou systému Da VinciTM je extra DOF, vymoženost instrumentů EndoWrist. Tato výhoda se projeví při složité rekonstrukční operaci, jakou je například laparoskopická pyeloplastika. Lze však namítnout, že lékař vyškolený pro laparoskopii, který je připraven věnovat čas trénování sutury na laparoskopickém trenažéru, to nemusí vnímat jako výhodu [2]. Další výhodou je 3D-zobrazení, i když jsou podobné systémy dostupné i pro běžnou LRP.
Při práci s touto technologií lze jednotlivé pohyby usměrnit, což znamená, že větší pohyby na konzole mohou být transformována do mikropohybů na místě operace. Tak se vyloučí problémy, které obvykle souvisejí s třesem rukou. Předpokládá se, že součinnost těchto faktorů posiluje obratnost a zlepšuje viditelnost, což vede k větší přesnosti, ke snížení ztráty krve a zmírnění operačních komplikací [14]. Navíc se předpokládá, že během roboticky asistovaného zákroku operatér zaujímá pohodlnější operační polohu než při běžné technice. Očekáváme výsledky studií, které hodnotí přesný ergonomický vztah mezi člověkem a nástrojem.
NEVÝHODY ROBOTICKÉ TECHNOLOGIE
Nejvýraznější nevýhodou systému Da VinciTM je jeho cena. Celkové pořizovací náklady jsou více než 1 milion GBP/1 800 000 USD, roční provozní náklady se pohybují okolo statisíce liber sterlingů/180 000 USD
(Poznámka šéfredaktora: V ČR je cena zařízení cca 50 mil Kč, náklady na jednu radikální prostatektomii činí 100 000 Kč).
Závažnější operační nevýhodou je nedostatek taktilní zpětné vazby. Řada technických a vědeckých institutů se zaměřuje na vývoj haptických technologií a v dalších generacích master-slave systémů snad budeme schopni taktilní zpětnou vazbu zprostředkovat. Je však správné položit si otázku, zda zavedení simulátorů virtuální reality (VR) do operačního tréninku nepovede k tomu, že budoucí operatéři se na taktilní zpětnou vazbu spoléhat nebudou. Na tréninkových VR - -systémech však mohou výborně zdokonalit technickou zručnost, která je pro roboticky asistovanou operaci nezbytná [15].
Přidání 4. ramena k systému Da VinciTM omezilo u některých zákroků potřebu asistenta na straně pacienta. Tato okolnost může sice znamenat úsporu finančních prostředků, ale také vyloučí možnost, aby asistující lékař získal cennou laparoskopickou zkušenost během roboticky asistovaného zákroku.
Další nevýhodou robotické operace je poměrně dlouhá doba přípravy. Tento problém by mohl odstranit dobře vyškolený multidisciplinární tým odborníků. Systémy Da VinciTM současné generace jsou poněkud neskladné, a proto může být začlenění systému do struktury operačního sálu náročné. Komponenty, které se v danou chvíli neužívají, je někdy třeba skladovat na jiném místě.
BUDOUCÍ VÝVOJ
Systém Da VinciTM může být určitě cenným doplňkem pro zařízení užívaná při minimálně invazivních operacích, vychází však z technologie vyvinuté v 2. polovině minulého století. Můžeme říci, že systém Da VinciTM neměl na trhu konkurenci, což poněkud potlačila jeho vývoj; společnost se snaží kompenzovat náklady. Systém prodělal několik drobných modifikací, například přidání 4. ramena. V nedávné době představili tvůrci systému Da Vinci STM vylepšení, které nabízí rychlejší nastavení a výměnu nástrojů, přístup z více stran a interaktivní displej. Očekáváme však další generaci systému Da VinciTM, která slibuje menší a snadněji ovladatelnou konzolu a operační vozík s haptickou technologií, jež umožní taktilní zpětnou vazbu. S napětím očekáváme též vývoj nových instrumentů EndoWristTM a účinnějších zdrojů energie, které by se daly při roboticky asistovaných zákrocích využít.
ZÁVĚR
Robotické technologie se při operačních zákrocích využívá stále častěji. Onkologické a funkční výsledky RALP jsou stejně dobré jako výsledky běžné LRP. Robotické metody vyžadují kratší dobu školení, takže tato minimálně invazivní metoda může zaujmout i lékaře, kteří nepracují s laparoskopií.
Zdůvodnění investic z veřejných finančních zdrojů do této technologie je poměrně obtížné, zejména pokud zdravotnictví funguje na základě ekonomického modelu, jaký je ve Spojeném Království. Argumentem, který by investice z veřejných zdrojů podpořil, může být výcvik lékařů zabývajících se běžnou laparoskopií; jistě by to bylo výhodnější než investice do nákladných trenažérů pro nácvik sutury [16]. Očekává se, že National Institute for Clinical Excellence ve Spojeném Království bude v blízké budoucnosti pověřen dohledem nad touto technologií.
Doufáme že další generace robotických technologií umožní nejenom zdokonalení současných systémů, ale předznamená snadnější dostupnost těchto systémů a umožní tak jejich rozšíření.
Declan Murphy
Ben Challacombe
Arun Sahai
Peter Acher
Prokar Dasgupta
Guy´s Hospital and School of Medicine,
King´s College London, Spojené království (UK)
Zdroje
1. Dasgupta P, Jones A, Gill IS. Robotic urological surgery: a perspective. BJU Int 2005 : 95 : 20-23.
2. Guillonneau B. What robotics in urology? A current point of view. Eur Urol 2003; 43 : 103-105.
3. Harris SJ, Arambula-Cosio F, Mei Q et al. The Probot-an active robot for prostate resection. Proc Inst Mech Eng 1997; 211 : 317-325.
4. Kavoussi LR, Moore RG, Adams JB et al. Comparison of robotic versus human laparoscopic camera control. J Urol 1995; 154 : 2134-2136.
5. Kumar R. Emerging role of robotics in urology. J Min Access Surg 2005; 1 : 202-210.
6. Menon M, Tewari A, Peabody JO. Vattikuti Institute prostatectomy: technique. J Urol 2003; 169 : 2289-2292.
7. Menon M, Tewari A, Peabody JO et al. Vattikuti Institute prostatectomy, a technique of robotic radical prostatectomy for management of localized carcinoma of the prostate: experience of over 1100 cases. Urol Clin North Am 2004; 31 : 701-717.
8. Menon M, Kaul S, Bhandari A et al. Potency following robotic radical prostatectomy: a questionnaire based analysis of outcomes after conventional nerve sparing and prostatic fascia sparing techniques. J Urol 2005; 174 : 2291-2296.
9. Tewari A, Srivasatava A, Menon M. A prospective comparison of radical retropubic and robot-assisted prostatectomy: experience in one institution. BJU Int 2003; 92 : 205-210.
10. Menon M, Tewari A, Baize B et al. Prospective comparison of radical retropubic prostatectomy and robot-assisted anatomic prostatectomy: the Vattikuti Urology Institute experience. Urology 2002; 60 : 864-868.
11. Ahlering TE, Woo D, Eichel L et al. Robot-assisted versus open radical prostatectomy: a comparison of one surgeon's outcomes. Urology 2004; 63 : 819-822.
12. Menon M. Robotic radical retropubic prostatectomy. BJU Int 2003; 91 : 175-176.
13. Ahlering TE, Skarecky D, Lee D et al. Successful transfer of open surgical skills to a laparoscopic environment using a robotic interface: initial experience with laparoscopic radical prostatectomy. J Urol 2003; 170 : 1738-1741.
14. Nedas TG, Challacombe BJ, Dasgupta P. Robotics in urology: an update. Int J Medical Robotics and Computer Assisted Surgery 2005; 1 : 13-8.
15. Nedas T, Challacombe B, Dasgupta P. Virtual reality in urology. BJU Int 2004; 94 : 255-257.
16. Eden CG, Moon DA, Gianduzzo TR. Concomitant management of renal calculi and pelvi-ureteric junction obstruction with robotic laparoscopic surgery. BJU Int 2006 : 97 : 653-654.
Štítky
Dětská urologie UrologieČlánek vyšel v časopise
Urologické listy

2006 Číslo 4
- Pacient se bude cítit komfortně pouze při správně zvolené absorpční pomůcce
- Na výběru inkontinenčních pomůcek záleží − ale jak se mezi nimi neztratit?
- Inkontinence jako důsledek operačního zákroku na prostatě
- Inkontinence moči ve stáří jako nejfrekventovanější medicínský problém
- Při preskripci inkontinenčních pomůcek je nezbytné hlídat limity
Nejčtenější v tomto čísle
- STRAVA A KARCINOM PROSTATY
- PSA A VČASNÁ DETEKCE KARCINOMU PROSTATY
- PÁNEVNÍ LYMFADENEKTOMIE U KARCINOMU PROSTATY A JEJÍ HRANICE
- LYMFATICKÁ DRENÁŽ PROSTATY
Zvyšte si kvalifikaci online z pohodlí domova
Mazová zátka a její řešení
nový kurzVšechny kurzy